Ronit's homepage
Graphics homepage
Sensing Through Structure: Designing Soft Silicone Sensors
Ronit Slyper (CMU, DRP) and Ivan Poupyrev (DRP) and Jessica Hodgins (CMU, DRP)
Carnegie Mellon University and Disney Research Pittsburgh
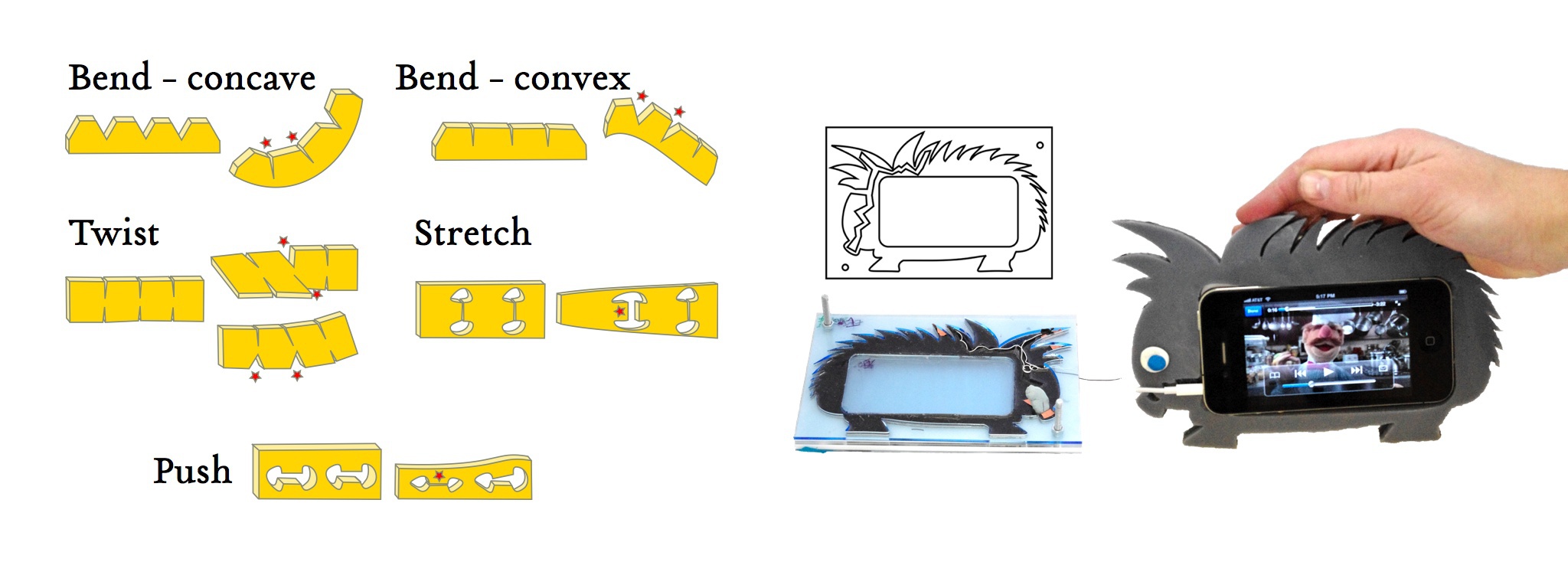
We take the manipulations required of an interactive device, and distill the deformations these motions cause in a (soft) material down to their basic structures. These structures can then be built as an integral part of a the device, creating an affordance in the object as well as providing a principled way to apply sensing instrumentation.
We present a method for designing and constructing rugged and soft multi-point sensors.
Interactions applied to a soft material are reduced to structural units of deformation. These structures can then be embedded and instrumented anywhere inside a soft sensor.
This simplification lets us design complex, durable sensors in easily manufacturable ways. In particular, we present a construction method of layering electronics between silicone pours to easily create sensors for arbitrary combinations of these deformations. We present several prototype sensors and discuss applications including toys, games, and therapy.
Ronit Slyper and Ivan Poupyrev and Jessica Hodgins. Sensing Through Structure: Designing Soft Silicone Sensors. In TEI '11: Proceedings of the fifth international conference on tangible, embedded, and embodied interaction, February 2011. BiBTeX